Projet ER S2 : Robot Labyrinthe Ligne, 2ème partie
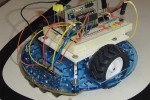
la 2ème partie du projet va consister à réaliser une plateforme mobile de type différentielle à deux moteurs capable de …Lire la suite


la 2ème partie du projet va consister à réaliser une plateforme mobile de type différentielle à deux moteurs capable de …Lire la suite
Pendant le second semestre 2010/2011, les étudiants de 1ère année du département G.E.I.I. de l’IUT de Nîmes vont travailler sur …Lire la suite

Comment réaliser une application avec un µC 16F88 Dans cette page, nous allons décrire comment réaliser une application autour d’un …Lire la suite

Voici un composant RC5 pour Flowcode PIC, il s’agit d’un composant utilisateur car Flowcode n’a pas encore inclus cette fonction. …Lire la suite
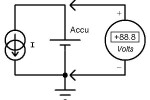
Un capacimètre pour accumulateur permet de mesurer la capacité réelle en mAh d’un accumulateur de type CdNi, NiMH ou encore …Lire la suite

Picky 1 : petite carte dédiée à la robotique Cette carte a été développée à l’I.U.T. de Nîmes pour le …Lire la suite
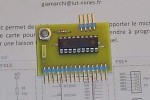
Voici une carte de test pour micro-contrôleur de type PIC à 18 broches. Elle a été testée avec les PIC …Lire la suite

MSP : Mini Sumo Projet Cette réalisation est le fruit d’une année d’études et de réalisations par les étudiants de …Lire la suite